上篇WIFI作品DIY教程07-《wifi家居网关》家居控制中心zigbee/nrf24l01等完成了家居网关。
在家里一些使用红外遥控器的电器,我们可以代替他,用我们自己diy的模块远程控制他。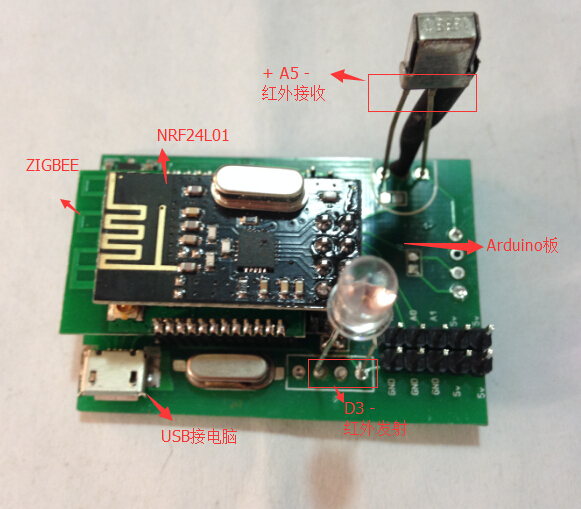
第一部分:红外发射、接收编码介绍
第二部分:下载编译源代码
1、CH340驱动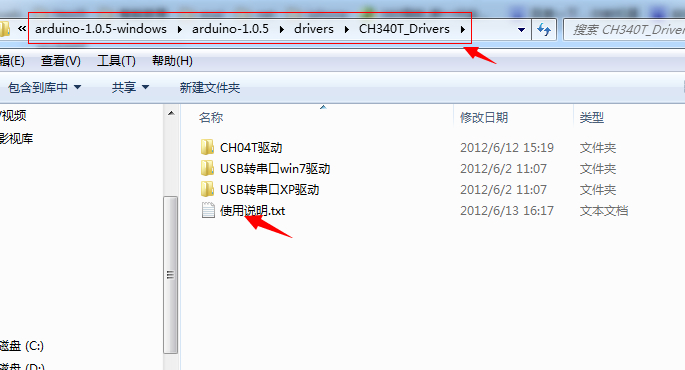
在drivers目录里找到CH340驱动,然后按说明安装(之前安装了就不用再安装了)。
2、源代码
001 002 003 004 005 006 007 008 009 010 011 012 013 014 015 016 017 018 019 020 021 022 023 024 025 026 027 028 029 030 031 032 033 034 035 036 037 038 039 040 041 042 043 044 045 046 047 048 049 050 051 052 053 054 055 056 057 058 059 060 061 062 063 064 065 066 067 068 069 070 071 072 073 074 075 076 077 078 079 080 081 082 083 084 085 086 087 088 089 090 091 092 093 094 095 096 097 098 099 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 194 195 196 197 198 199 200 201 202 203 204 205 206 207 208 209 210 211 212 213 214 215 216 217 218 219 220 221 222 223 224 225 226 227 228 229 230 231 232 233 234 235 236 237 238 239 240 241 242 243 244 245 246 247 248 249 250 251 252 253 254 255 256 257 258 259 260 261 262 263 264 265 266 267 268 269 270 271 272 273 274 275 276 277 278 279 280 281 282 283 284 285 286 287 288 289 290 291 292 293 294 295 296 297 298 299 300 301 302 303 304 305 306 307 308 309 310 311 312 313 314 315 316 317 318 319 320 321 322 323 324 325 326 327 328 329 330 331 332 333 334 335 336 337 338 339 340 341 342 343 344 345 346 347 348 349 350 351 352 353 354 355 356 357 358 359 360 361 362 363 364 365 366 367 368 369 370 371 372 373 374 375 376 377 378 379 380 381 382 383 384 385 386 387 388 389 390 391 392 393 394 395 396 397 398 399 400 401 402 403 404 405 406 407 408 409 410 411 412 413 414 415 416 417 418 419 420 421 422 423 424 425 426 427 428 429 430 431 432 433 434 435 436 437 438 439 440 441 442 443 444 445 446 447 448 449 450 451 452 453 454 455 456 457 458 459 460 461 462 463 464 465 466 467 468 469 470 471 472 473 474 475 476 477 478 479 480 481 482 483 484 485 486 487 488 489 490 491 492 493 494 495 496 497 498 499 500 501 502 503 504 505 506 507 508 509 510 511 512 513 514 515 516 517 518 519 520 521 522 523 524 525 526 527 528 529 530 531 532 533 534 535 536 537 538 539 540 541 542 543 544 545 546 547 548 549 550 551 552 553 554 555 556 557 558 559 560 561 562 563 564 565 566 567 568 569 570 571 572 573 574 575 576 577 578 579 580 581 582 583 584 585 586 587 588 589 590 591 592 593 594 595 596 597 598 599 600 601 602 603 604 605 606 607 608 609 610 611 612 613 614 615 616 617 618 619 620 621 622 623 624 625 626 627 628 629 630 631 632 633 634 635 636 637 638 639 640 641 | /* *NRF24l01针脚连接线 * MISO -> 12 * MOSI -> 11 * SCK -> 13 * Configurable: * CE -> 8 * CSN -> 7*/#include <SPI.h>#include <Mirf.h>#include <nRF24L01.h>#include <MirfHardwareSpiDriver.h>#include <EEPROM.h>#include <IRremote.h>int sid=20;//模块类型int nid=1;//模块编号//声名变量//无线串口通信处理(zigbee/bluetooth等)unsigned long serial1nowlast;char serial1buff[129]={0};char serial1Data;int serial1i=0;//NRF24l01unsigned long nrf24l01nowlast;char nrf24l01buff[33]={0};char nrf24l01Data;int nrf24l01i=0;int pinIn0=A0;int val0;int pinOut0=A1;IRsend irsend;int isdump=0;//int RECV_PIN = A5;IRrecv irrecv(RECV_PIN);decode_results results;void setup(){ Serial.begin(115200); char client[10]={0};//client sprintf(client,"clie%d",sid); //初始化Mirf,用于NRF24l01收发 Mirf_Init(0,client,sid); pinMode(pinIn0,INPUT); pinMode(pinOut0,OUTPUT); pinMode(pinIn0,INPUT_PULLUP); //将管脚设置为输入并且内部上拉模式 digitalWrite(pinIn0, HIGH); irrecv.enableIRIn(); // Start the receiver Serial.println("zwifi_hongweixian");}void loop(){ //检测无线串口数据处理 (zigbee/bluetooth等) { unsigned long serial1now = millis();//获取现在的时间 if(serial1now - serial1nowlast >= 5000)//如果数据间隔超过5秒而清空字符(为了防止数据错乱) { serial1nowlast = millis(); memset(serial1buff, 0, 129); serial1i=0; } while( Serial.available() )//如果无线串口有数据 { if(serial1i==0) { Serial.println("serial->");//打印出来方便调试 } serial1Data=(char)Serial.read();//读取串口数据 //Serial.print(serial1Data);////这里不打印,否则检测到{ckxxxx}就认为是命令 serial1buff[serial1i]=serial1Data;////保存到数组 serial1i++;////数组长度+1 if(serial1Data=='}' || serial1i>=129)//如果发现}而说明命令结束(并少于129个字符,太长会出错) { serial1nowlast = millis(); //更新当前时间,不然5秒就超时了 char body[129]={0}; get_znck_body(serial1buff,body);//获取只是{ckxxxxxx}的字符,因为这是我们的命令格式 //serial.println(body); //如果命令格式真确则发送到无线串口 if(strstr(body,"{ck") && strstr(body,"}") ) { //Serial.println(body); if(strlen(body)>10) { send_infrared(body); } } serial1i=0;//字符长度为0 Serial.println("-------------------"); delay(100); } } } unsigned long nrf24l01now = millis();//获取现在的时间 if(nrf24l01now - nrf24l01nowlast >= 5000)//如果数据间隔超过5秒而清空字符(为了防止数据错乱) { nrf24l01nowlast = millis(); memset(nrf24l01buff, 0, 33); nrf24l01i=0; } byte data[Mirf.payload]; if(Mirf.dataReady()){//!Mirf.isSending() && Mirf.getData(data); Mirf.rxFifoEmpty(); //清理24L01援存 //Serial.println((char)*data); for (int i = 0; i < Mirf.payload; i++) //把收到的信息拼起来 { if(nrf24l01i==0) { Serial.println("nrf24l01->");//打印出来方便调试 } nrf24l01Data=(char)data[i]; if( nrf24l01Data=='{') nrf24l01i=0; nrf24l01buff[nrf24l01i]=nrf24l01Data;//保存到数组 nrf24l01i++;////数组长度+1 if(nrf24l01Data=='}' || nrf24l01i>=33)//如果发现}而说明命令结束(并少于33个字符,太长会出错) { nrf24l01nowlast = millis(); //更新当前时间,不然5秒就超时了 char body[33]={0}; get_znck_body(nrf24l01buff,body);//获取只是{ckxxxxxx}的字符,因为这是我们的命令格式 //Serial.println(body); //如果命令格式真确则发送到无线串口 if(strstr(body,"{ck") && strstr(body,"}") ) { //Serial.println(body); if(strlen(body)>10) { send_infrared(body); } } memset(nrf24l01buff, 0, 33); nrf24l01i=0;//字符长度为0 Serial.println("-------------------"); delay(100); } } } val0=digitalRead(pinIn0);//读取数字 if(val0==LOW || isdump==1)//检测按键是否按下 { digitalWrite(pinOut0,HIGH); //delay(2000); if (irrecv.decode(&results)) { Serial.println(results.value, HEX); dump(&results); irrecv.resume(); // Receive the next value } //Serial.println("dumpcheck..."); //delay(100); } digitalWrite(pinOut0,LOW); delay(10); }//初始化Mirf 0初始化1为接收2为发送void Mirf_Init(int txrx,char *server,int channel){ //初始化Mirf,用于NRF24l01收发 if(txrx==0) { Mirf.spi = &MirfHardwareSpi; Mirf.init(); Mirf.setRADDR((byte *)server);//设置接收地址 } if(txrx==1) { Mirf.setRADDR((byte *)server);//设置接收地址 } if(txrx==2) { Mirf.setTADDR((byte *)server);//设置发送地址 } Mirf.payload = sizeof(char);//收发字节 Mirf.channel = channel; Mirf.config();}//NRF24l01发送函数void Mirf_Send(int channel,char *server,char *str){ Mirf_Init(2,server,channel); int bufi=0; for(bufi=0;bufi<strlen(str);bufi++){ 循环发送 char words=str[bufi];//发送的字符 Mirf.send((byte *)&words);//发送命令 while(Mirf.isSending()){//等待发送完闭 } delay(50);//延时,否则可能出现发送丢失现象 //Serial.print(words); } //Serial.println(""); }//获取只是{ckxxxxxx}的字符,因为这是我们的命令格式 void get_znck_body(char *p,char *s){ char rechar[33]={0}; int bufi=0; bool isend=false; int charnum=0; for(bufi=0;bufi<strlen(p);bufi++){ //Serial.print(p[bufi]); if(p[bufi]=='{'){ isend=true; } if(p[bufi]=='}' && isend==true){ isend=false; rechar[charnum]=p[bufi]; break; } if(isend){ if(charnum<33) { rechar[charnum]=p[bufi];//Serial.print(rechar[charnum]); charnum++; } } } //Serial.println(""); //memcpy(s,rechar,33); sprintf(s,"%s",rechar);}//void send_infrared(char *body){ int s=get_sid(body); int n=get_nid(body); char d[32]={0}; get_data(body,d); if( s==sid && n==nid ) { if( strlen(d)==1 && d[0]=='0' ) { isdump=1; } if( strlen(d)==1 && d[0]=='1' ) { char sdata[20]={0}; sendEEPROM(sdata); } if( strlen(d)>5 ) { sendEEPROM(d); } } if( s==sid ){ char server[10]={0};//server sprintf(server,"serv%d",1); //Serial.println(server); char updateData[33]={0}; char front[10]={0}; //memcpy(front,body,9); sprintf(front," {ck%03d%03d",s,n); sprintf(updateData,"%supdate}",front); Serial.println(updateData); Mirf_Send(1,server,updateData); char client[10]={0};//client sprintf(client,"clie%d",sid); Mirf_Init(1,client,sid); delay(2000); }}int get_sid(char *buff){ if( strstr(buff,"{ck") && strstr(buff,"}") && strlen(buff)>10) { char charSid[4]={0}; memcpy(charSid,buff+3,3); Serial.println(charSid); int intSid=atoi(charSid); Serial.println(intSid); return intSid; } else { return 0; }}int get_nid(char *buff){ if( strstr(buff,"{ck") && strstr(buff,"}") && strlen(buff)>10) { char charNid[4]={0}; memcpy(charNid,buff+6,3); Serial.println(charNid); int intNid=atoi(charNid); Serial.println(intNid); return intNid; } else { return 0; }}int get_data(char *buff,char *sdata){ if( strstr(buff,"{ck") && strstr(buff,"}") && strlen(buff)>10) { for (int i = 0; i < strlen(buff); i++) { if( buff[9+i]=='}' ) break; sdata[i]=buff[9+i]; } //char charData[20]={0}; //memcpy(charData,buff+9,1); //Serial.println(charData); //int intData=atoi(charData); //Serial.println(intData); return 1;//intData; } else { return 0; }}// Dumps out the decode_results structure.// Call this after IRrecv::decode()// void * to work around compiler issue//void dump(void *v) {// decode_results *results = (decode_results *)vvoid dump(decode_results *results) { int count = results->rawlen; if (results->decode_type == UNKNOWN) { return; Serial.print("Unknown encoding: "); } else if (results->decode_type == NEC) { Serial.print("Decoded NEC: "); } else if (results->decode_type == SONY) { Serial.print("Decoded SONY: "); } else if (results->decode_type == RC5) { Serial.print("Decoded RC5: "); } else if (results->decode_type == RC6) { Serial.print("Decoded RC6: "); } else if (results->decode_type == PANASONIC) { Serial.print("Decoded PANASONIC - Address: "); Serial.print(results->panasonicAddress,HEX); Serial.print(" Value: "); } else if (results->decode_type == JVC) { Serial.print("Decoded JVC: "); } else { return; } Serial.print(results->value, DEC); Serial.print(" ("); Serial.print(results->bits, DEC); Serial.println(" bits)"); Serial.print("Raw ("); Serial.print(count, DEC); Serial.print("): "); for (int i = 0; i < count; i++) { if ((i % 2) == 1) { Serial.print(results->rawbuf[i]*USECPERTICK, DEC); } else { Serial.print(-(int)results->rawbuf[i]*USECPERTICK, DEC); } /* Serial.print(","); char tbuf[10]={0}; sprintf(tbuf,"%02X",results->rawbuf[i]*USECPERTICK); //Serial.print(tbuf); strcat(rawbuf,tbuf); Serial.print(" "); */ } Serial.println(""); char rawbuf[255]={0}; char decode_type[10]={0}; sprintf(decode_type,"%d,",results->decode_type); strcat(rawbuf,decode_type); char decode_value[16]={0}; sprintf(decode_value,"%ld,",results->value); strcat(rawbuf,decode_value); char decode_bits[10]={0}; sprintf(decode_bits,"%d,",results->bits); strcat(rawbuf,decode_bits); for (int i = 0; i < 256; i++) { EEPROM.write(i, 0); } for (int i = 0; i < strlen(rawbuf); i++) { EEPROM.write(i, rawbuf[i]); } Serial.println(rawbuf); Serial.print("EEPROM.write count="); Serial.print(strlen(rawbuf)); Serial.println(""); isdump=0;}void sendEEPROM(char* data){ Serial.print("sendEEPROM="); Serial.println(data); char eepchar[32]={0}; if( strlen(data)>5 ){ memcpy(eepchar,data,strlen(data)); }else{ for (int i = 0; i < 256; i++) { long eep = EEPROM.read(i); if(eep==0){ break; } eepchar[i]=eep; Serial.print(eep,DEC); Serial.print(" "); } } Serial.println(""); Serial.println(eepchar); int ir_type=get_ir_type(eepchar); long ir_value=get_ir_value(eepchar); int ir_bits=get_ir_bits(eepchar); Serial.println(ir_type); Serial.println(ir_value); Serial.println(ir_bits); if( ir_type>0 && ir_value>0 && ir_bits>0 ){ Serial.println("irsend.sendRaw"); irsenddata(ir_type,ir_value,ir_bits); } //irsend.sendRaw(rawbuf, strlen(rawbuf), 38 /* kHz */); //irsend.sendNEC(0x82e0040a, 32);}void irsenddata(int type, unsigned long value, int bits) { if (type == NEC) { irsend.sendNEC(value, bits); Serial.print("sendNEC="); Serial.print(value,DEC); Serial.print(" bits="); Serial.print(bits,DEC); Serial.println(""); } else if (type == SONY) { irsend.sendSony(value, bits); Serial.print("sendSony="); Serial.print(value,DEC); Serial.print(" bits="); Serial.print(bits,DEC); Serial.println(""); } else if (type == RC5) { irsend.sendRC5(value, bits); Serial.print("sendRC5="); Serial.print(value,DEC); Serial.print(" bits="); Serial.print(bits,DEC); Serial.println(""); } else if (type == RC6) { irsend.sendRC6(value, bits); Serial.print("sendRC6="); Serial.print(value,DEC); Serial.print(" bits="); Serial.print(bits,DEC); Serial.println(""); } else { Serial.print(type); Serial.println("Bad type!"); } delay(200); }int get_ir_type(char *buff){ if( strstr(buff,",") && strlen(buff)>5) { int n=0; int m=0; char chartype[4]={0}; for(int i=0;i< strlen(buff);i++){ if((char)buff[i]==','){ n++; if(n==1) break; } chartype[m]=buff[i]; m++; } //memcpy(chartype,buff+6,3); Serial.print("get_ir_type"); Serial.print(" char="); Serial.print(chartype); int inttype=atoi(chartype); Serial.print(" int="); Serial.print(inttype); Serial.println(""); return inttype; } else { return 0; }}long get_ir_value(char *buff){ if( strstr(buff,",") && strlen(buff)>5) { int n=0; int m=0; char charvalue[16]={0}; for(int i=0;i< strlen(buff);i++){ if(buff[i]==','){ n++; if(n==1) { m=0; memset(charvalue,0,16); continue;}; if(n==2) break; } charvalue[m]=buff[i]; m++; } //memcpy(charvalue,buff+6,3); Serial.print("get_ir_value"); Serial.print(" char="); Serial.print(charvalue); long longvalue=atol(charvalue); Serial.print(" long="); Serial.print(longvalue); Serial.println(""); return longvalue; } else { return 0; }}int get_ir_bits(char *buff){ if( strstr(buff,",") && strlen(buff)>5) { int n=0; int m=0; char charbits[16]={0}; for(int i=0;i< strlen(buff);i++){ if((char)buff[i]==','){ n++; if(n==1) { m=0; memset(charbits,0,16); continue;}; if(n==2) { m=0; memset(charbits,0,16); continue;}; if(n==3) break; } charbits[m]=buff[i]; m++; } //memcpy(charvalue,buff+6,3); Serial.print("get_ir_bits"); Serial.print(" char="); Serial.print(charbits); int intbits=atoi(charbits); Serial.print(" int="); Serial.print(intbits); Serial.println(""); return intbits; } else { return 0; }} |
第三部分:测试学习,发射,无线通信等
打开arduino ide 的串口监视
输入{0200010}进入自学模式。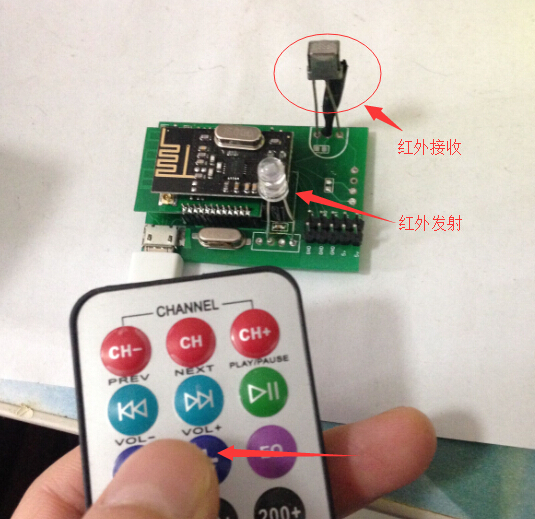
对着点遥控器。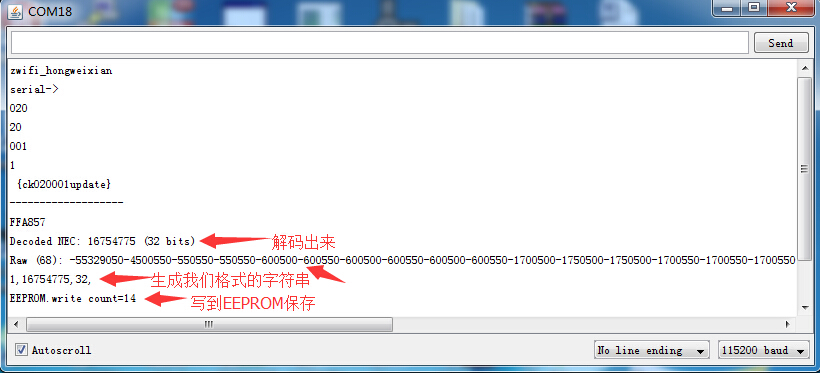
红外自动解码,写入flash里。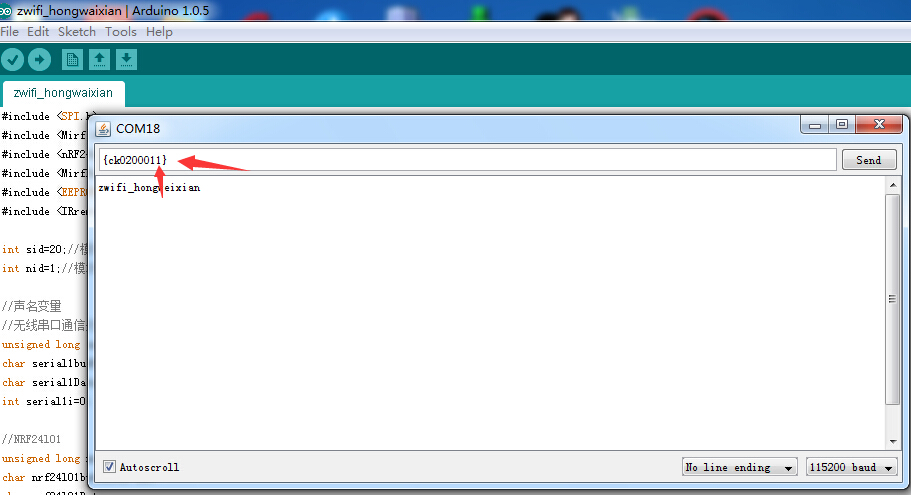
输入{ck0200011}发射保存在flash里的红外编码。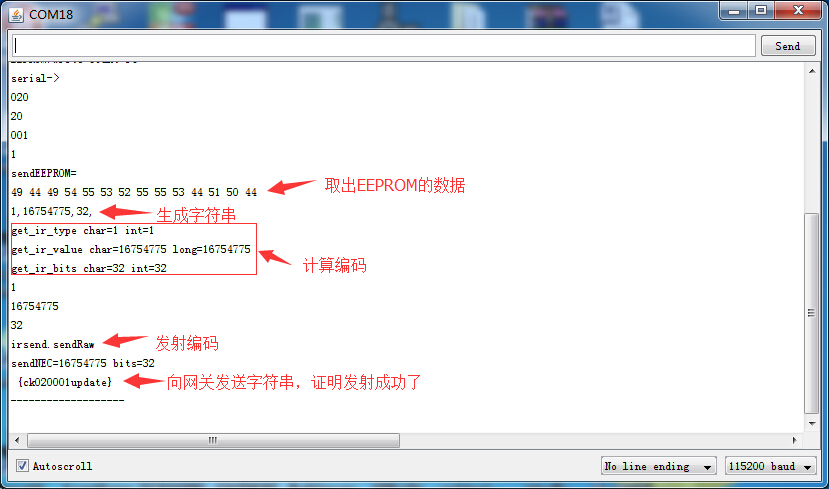
取出组成字符,再解成红外编码,再发射。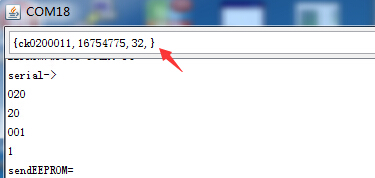
直接发射已知的红外编码{ck02000111,16754775,32,}。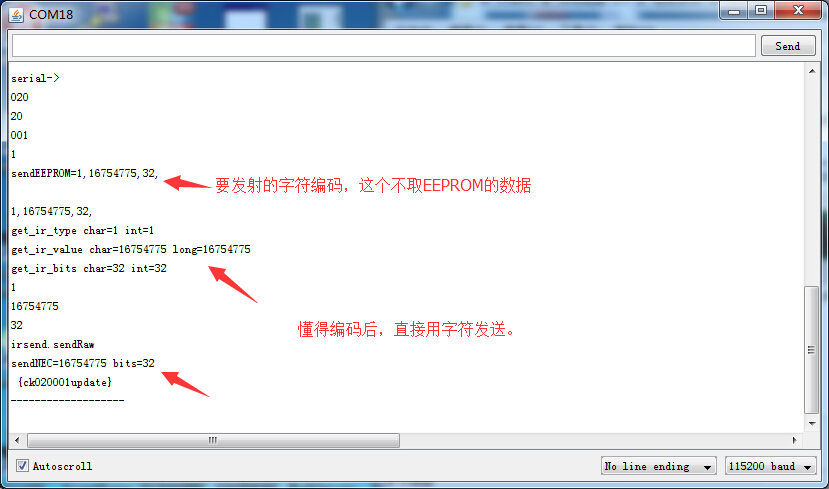
这里发射就少了去flash取编码了,直接发射字符转成的红外编码。
第四部分:关于工业家电红外解码的的方法。
A、修改arduino_iremote_master库文件
你要找到如下三个文件 IRremote.ccp IRremote.h IRremoteInt.h ,在 arduino安装目录下的librariesarduino_iremote_master1、修改IRremote.h
#define RAWBUF 270 // Length of raw duration buffer
这个默认值是100,因为我们接收的数据会超过100,所以在这里改成270,当然你也可以根据需要继续扩大
2、修改IRremoteInt.h
1)#define _GAP 50000 // Minimum map between transmissions
默认的数据是5000,因为遥控器会连续发两段代码,所以5000这个参数不适用,需要改到50000,否则你只能
接受到前一段代码仍然无法控制你家的空调
2)// information for the interrupt handler
typedef struct {
uint8_t recvpin; // pin for IR data from detector
uint8_t rcvstate; // state machine
uint8_t blinkflag; // TRUE to enable blinking of pin 13 on IR processing
unsigned int timer; // state timer, counts 50uS ticks.
unsigned int rawbuf[RAWBUF]; // raw data
// uint8_t rawlen; // counter of entries in rawbuf
int rawlen;
}
irparams_t;
这段代码我们要修改的 rawlen的定义,在默认库中这个数据被定义为uint8 也就是 一个字节的整数,最大只能到255
所以我们将此参数改成int
3、在arduino 中调出IRecvDump 的例程序,可以通过 FILE->EXAMPLES->Arduino_IRremote_master
1)编译和下载,打开com口监控 Tools->Serial Monitor
2)使用你家的空调遥控器对着接收头按一下开关键
3)这个时候串口会跳出你家空调开关的代码
“Raw (264): 13306 3500 -1700 450 -1250 500 -400 450。。。。”
请记住第一个 13306 不是代码头,你需要把这个放到你的数据的最后也就是说你的发送代码是
Raw (264): 3500 -1700 450 -1250 500 -400 450 。。。。。。。13306“
把你接受的数据 放入程序,也就是unsigned int rawCodes_ac_close[264]这个数组【】内的数字根据你接受的数据大小来调整
01 02 03 04 05 06 07 08 09 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 | /* * IRremote: IRrecvDump - dump details of IR codes with IRrecv * An IR detector/demodulator must be connected to the input RECV_PIN. * Version 0.1 July, 2009 * Copyright 2009 Ken Shirriff * [url=http://arcfn.com]http://arcfn.com[/url] * JVC and Panasonic protocol added by Kristian Lauszus (Thanks to zenwheel and other people at the original blog post) */ #include int RECV_PIN = 11;//定义红外接收器的引脚为11//unsigned int rawCodes_ac_close[264]={3288,1591,432,1186,432,372,444,383,433,375,443,1184,434,382,434,383,433,384,433,383,433,1187,432,382,433,1186,432,1185,432,382,434,1186,431,1187,432,1186,432,1186,432,1186,432,383,433,1185,432,383,434,383,433,1186,432,383,433,383,433,383,433,384,433,1186,432,1186,432,1186,432,1186,432,383,433,383,433,383,433,384,433,384,433,384,433,383,433,383,433,383,433,383,433,383,433,384,433,384,432,384,432,383,433,383,432,384,432,385,432,385,432,384,432,384,432,385,432,384,432,384,432,384,432,1187,431,384,433,384,432,1187,431,1186,431,1186,431,384,433,27841,3287,1590,432,1186,431,384,434,383,433,383,433,1185,434,375,441,383,433,383,434,383,432,1186,433,382,433,1187,431,1186,432,383,433,1187,431,1186,432,1186,431,1186,432,1186,432,382,432,1187,431,383,433,384,433,1187,432,383,434,383,433,384,433,384,433,384,433,384,433,384,433,384,433,1186,432,1186,431,1187,431,1186,432,383,433,384,433,382,433,1186,430,1188,431,384,433,383,433,384,432,384,432,385,432,384,433,384,432,384,432,384,432,384,432,384,432,385,431,384,432,384,432,385,432,384,432,1188,431,383,433,384,432,1187,431,384,432,384,433,384,432,27841}; //unsigned int rawCodes_ac_close[264]={3448,1668,453,1244,453,390,466,402,454,393,464,1242,455,400,455,401,454,402,454,402,454,1244,453,401,454,1244,453,1243,453,401,455,1243,452,1244,453,1243,453,1243,453,1243,453,402,454,1243,453,402,455,401,454,1244,453,401,454,402,454,401,454,402,454,1244,453,1244,453,1244,453,1243,453,401,454,402,454,402,454,403,454,402,454,402,454,402,454,402,454,402,454,402,454,402,454,402,454,403,453,402,453,402,454,402,453,403,453,403,452,403,453,403,453,402,453,403,453,403,453,403,453,403,453,1245,452,402,454,402,452,1245,452,1244,452,1244,452,402,454,29191,3446,1668,453,1244,452,402,455,402,454,402,454,1242,455,394,462,401,454,402,455,402,453,1244,454,401,454,1244,452,1244,453,401,454,1244,452,1243,453,1243,452,1244,453,1243,453,401,453,1245,452,402,454,402,454,1244,452,401,455,402,454,402,454,402,454,402,454,402,454,402,454,403,454,1244,453,1244,452,1245,452,1244,453,402,454,402,454,401,454,1244,451,1245,452,402,454,402,454,403,453,403,453,403,453,403,454,403,453,403,453,402,453,403,453,403,453,403,452,403,453,403,453,403,453,403,453,1245,452,402,454,402,453,1245,452,403,453,402,454,402,453,29191}; unsigned int rawCodes_ac_close[264]={3500,1700,450,1250,500,400,450,400,450,450,450,1250,450,400,500,350,500,400,450,400,500,1250,450,400,500,1250,450,1250,450,400,500,1250,450,1300,450,1250,450,1300,450,1250,450,400,500,1250,450,400,450,400,500,1250,450,400,500,400,450,400,450,450,450,1250,450,1300,450,1250,450,1250,500,400,450,400,450,400,500,400,450,400,500,400,450,400,450,450,450,400,450,400,500,400,450,400,450,400,500,400,450,400,450,450,450,400,450,400,500,400,450,400,450,450,450,400,450,400,500,400,450,400,450,1300,450,400,450,400,500,1250,450,1250,450,1300,450,400,450,29650,3500,1700,450,1300,450,400,450,400,500,400,450,1250,500,400,450,400,450,400,500,400,450,1250,500,400,450,1250,450,1300,450,400,450,1250,500,1250,450,1250,500,1250,450,1250,500,400,450,1250,450,400,500,400,450,1250,500,400,450,400,450,450,450,400,450,400,500,400,450,400,450,400,500,1250,450,1250,500,1250,450,1250,500,400,450,400,450,400,500,1250,450,1250,500,400,450,400,450,450,450,400,450,400,500,350,500,400,450,450,450,400,450,400,450,450,450,400,450,400,500,400,450,400,450,450,450,1250,450,400,500,400,450,1250,450,400,500,400,450,400,500,13306};//上面改成你接受到的数据,请注意把接受到的第一个数据放到最后 IRrecv irrecv(RECV_PIN); decode_results results; IRsend irsend; //test void setup(){ Serial.begin(9600); irrecv.enableIRIn(); // 初始化红外接收器} void dump(decode_results *results) { int count = results->rawlen; if (results->decode_type == UNKNOWN) { Serial.print("Unknown encoding: "); } else if (results->decode_type == NEC) { Serial.print("Decoded NEC: "); } else if (results->decode_type == SONY) { Serial.print("Decoded SONY: "); } else if (results->decode_type == RC5) { Serial.print("Decoded RC5: "); } else if (results->decode_type == RC6) { Serial.print("Decoded RC6: "); } else if (results->decode_type == PANASONIC) { Serial.print("Decoded PANASONIC - Address: "); Serial.print(results->panasonicAddress,HEX); Serial.print(" Value: "); } else if (results->decode_type == JVC) { Serial.print("Decoded JVC: "); } Serial.print(results->value, HEX); Serial.print(" ("); Serial.print(results->bits, DEC); Serial.println(" bits)"); Serial.print("Raw ("); Serial.print(count, DEC); Serial.print("): "); for (int i = 0; i < count; i++) { if ((i % 2) == 1) { Serial.print(results->rawbuf[i]*USECPERTICK, DEC); } else { Serial.print(-(int)results->rawbuf[i]*USECPERTICK, DEC); } Serial.print(" "); } Serial.println("");} void loop() { irsend.sendRaw(rawCodes_ac_close,264, 40); delay(5); // irsend.sendRaw(rawCodes_ac_close,264, 40); if (irrecv.decode(&results)) { Serial.println(results.value, HEX); dump(&results); // irsend.mark(560); // irsend.space(560); // irsend.mark(2000); // irsend.space(560); //rsend.sendRaw(rawCodes_ac_close,6, 32); irrecv.resume(); // Receive the next value } delay(5000);} |
B、使用逻辑分析仪,很多遥控器解不出来,那么就要利用更牛B的工具了。
通过网购一个叫“逻辑分析仪”的设备分析出来空调的“关”编码。
设备是上面的这个样子,也有其他样子,使用起来基本是一样的。
USB接口的,安装驱动、安装配套软件什么的不上图了,没什么悬念。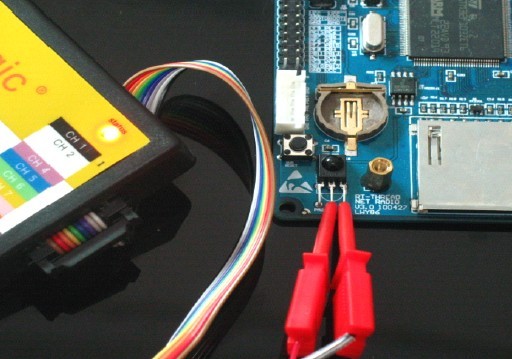
两根线,分析仪上标了“公共地线”的接arduino的GND,“数字通道1”接红外接收头的数字引脚。
注:红外接收头有3个引脚,vcc(3.3v),gnd(地),输出(我接到arduino的引脚2)
上图中,一个接到数字接收头的GND,一个接到输出了。
然后,然后才加电。逻辑分析仪特别指出要断电接线的。所以要小心,不要把¥35烧了。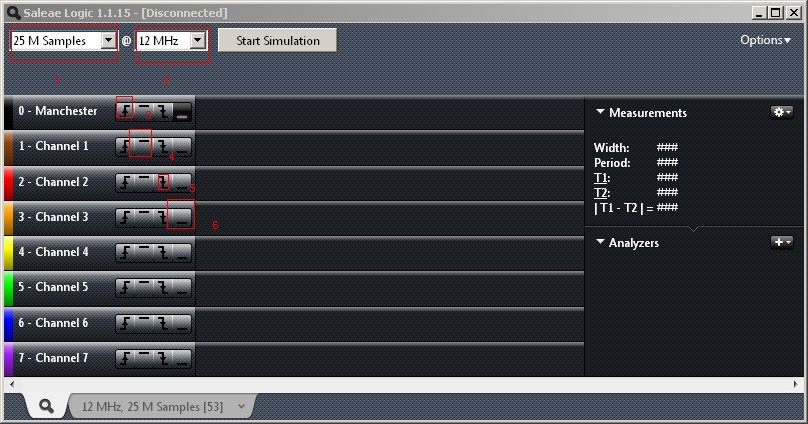
运行软件,界面如下:
标1处是采样的时间长短(越大越占内存),
2是采样频率,
3是上升沿触发,
4是高电平触发,
5是下降沿触发,
6是低电平触发(分析红外就把它按下,红外是低电平触发)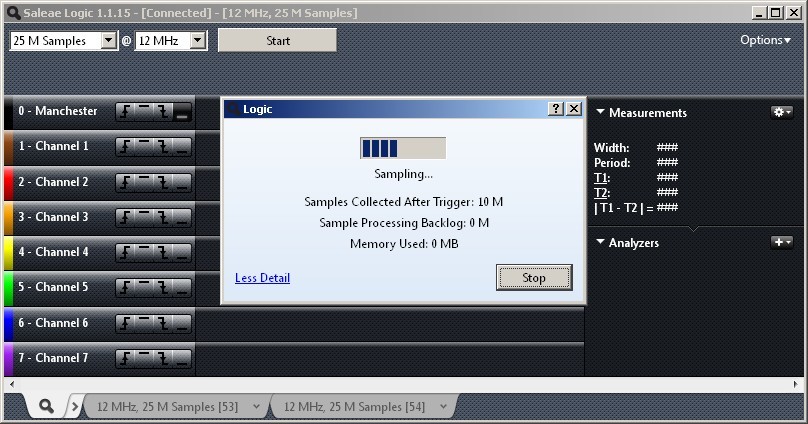
因为抓红外原始数据就一个通道,我只要把数字通道1的“低电平触发”按下就可以开始捕获数据了。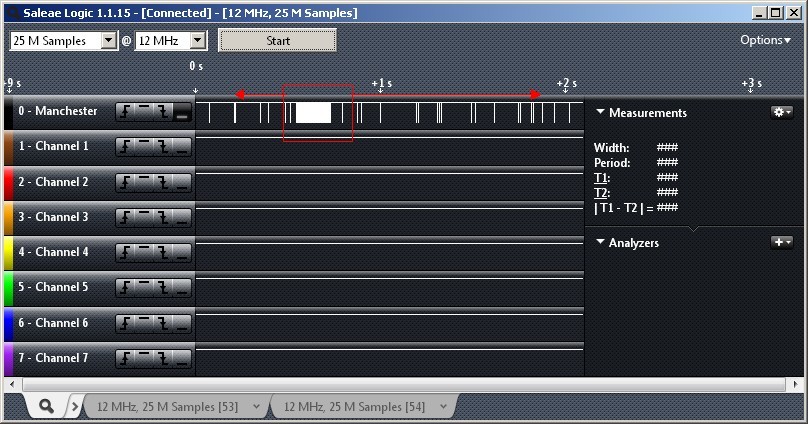
在显示sampling(采样)的时候,对着红外接收头,按下红外遥控器的关,别按错键了。开和关在一个按键上,但是编码不一样。
记得用鼠标滚轮把图例缩小到最小,你能看到一团数据在哪里,看不到的话,多试几次。
嗯,如果你有心,会发现,这个数据团会根据你按键的时间点而往前或者往后移动。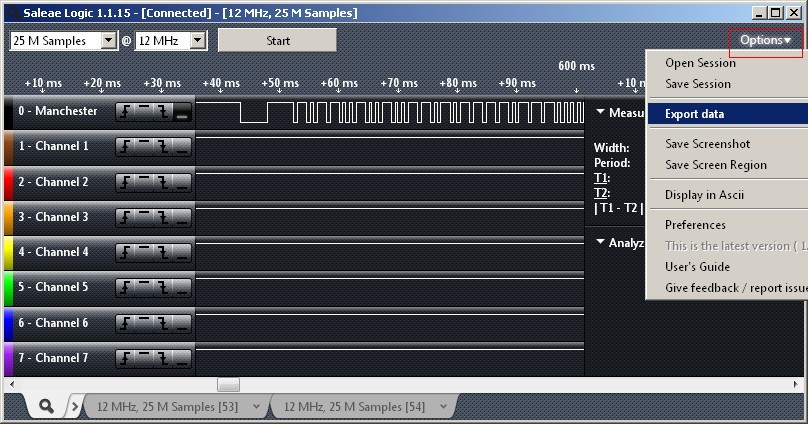
放大,放大放大放大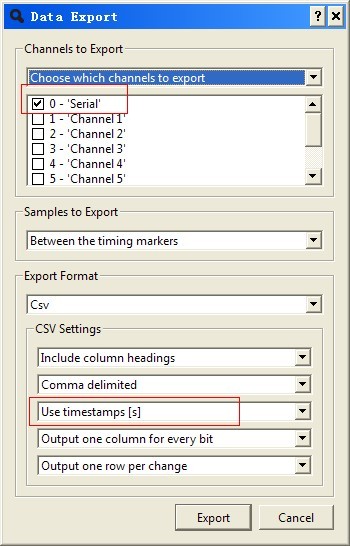
这里我们选择下面的模式,经验告诉我,这样的"TimeStamps"导出格式后期处理最简单。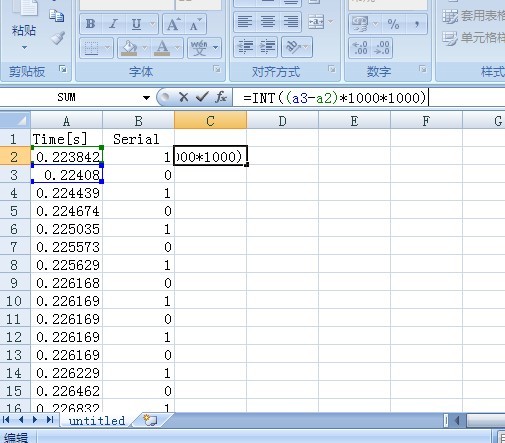
这种导出的数值,就是每个点的具体时间。
填上函数=INT((a3-a2)*1000*1000),这个函数的意思是:帮我算下两个之间的差值,再转换成毫秒,再转换成微秒,再取整。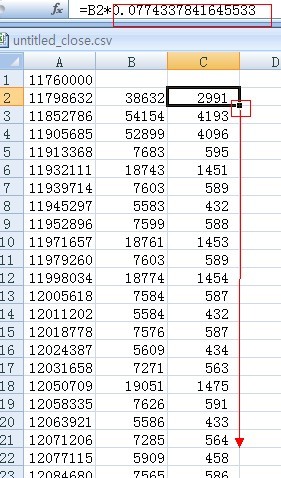
一拖到底
这么多数字,取哪些呢?
看看原始格式,2个大数字在前,后面跟着一堆小数字,很容易就把头找到了。
转换成arduino的代码
1 | unsigned int rawCodes_ac_close[200] ={4193,4096,595,1451,589,432,588,1453,589,1454,587,432,587,434,563,1475,591,433,564,458,586,1453,587,434,587,433,563,1476,590,1454,587,434,565,1475,566,456,563,1476,590,1453,587,1452,564,1477,566,457,585,1453,567,1477,587,1452,564,460,584,434,564,457,562,460,562,1475,587,434,588,433,562,1476,589,1455,563,1476,588,433,586,436,562,459,586,433,563,458,609,410,563,458,586,433,587,1454,587,1453,563,1477,564,1477,565,1476,581,4858,4237,4074,593,1453,562,460,563,1477,563,1477,565,458,587,434,584,1454,590,433,562,458,587,1453,588,436,584,436,562,1476,588,1453,590,434,562,1480,586,435,586,1453,565,1476,589,1453,589,1451,565,461,583,1453,589,1453,588,1454,564,457,587,434,587,433,587,435,561,1479,586,435,562,458,588,1452,590,1452,565,1476,564,458,587,436,584,433,562,458,588,432,562,461,585,434,584,435,589,1451,588,1453,588,1453,590,1453,590,1451,590}; |
irsend.sendRaw(rawCodes_ac_close,200, 38);
在代码里发射吧。
更多玩法,自己琢磨。
如果收集市面上所有的遥控器编码,那么就是一个万能遥控器,这可能需要一个公司才能做了,大家加油吧。
参考:http://www.geek-workshop.com/thread-5095-1-1.html